
+
 微信號(hào):聯(lián)系方式
微信號(hào):聯(lián)系方式

微信號(hào):聯(lián)系方式


-
 全國(guó)服務(wù)熱線
全國(guó)服務(wù)熱線
- 0591-83517896
從 Pixhawk (PX4/APM) 飛控觸發(fā) Survey3/2 相機(jī)
來(lái)源:馬普科技(福州)有限公司 | 發(fā)布時(shí)間:2023年08月30日本指南將引導(dǎo)您完成使用Survey3/2 HDMI 觸發(fā)電纜從 PWM 信號(hào)觸發(fā) Survey3/2 攝像機(jī)所需的硬件和軟件修改。
免責(zé)聲明:您自擔(dān)風(fēng)險(xiǎn),我們對(duì)您因這些說(shuō)明可能對(duì)您的無(wú)人機(jī)或相機(jī)造成的任何損害不承擔(dān)任何責(zé)任。如果您正確執(zhí)行所有操作,則不會(huì)造成任何損壞,并且可以通過(guò)恢復(fù)出廠設(shè)置輕松恢復(fù)到原始設(shè)置。
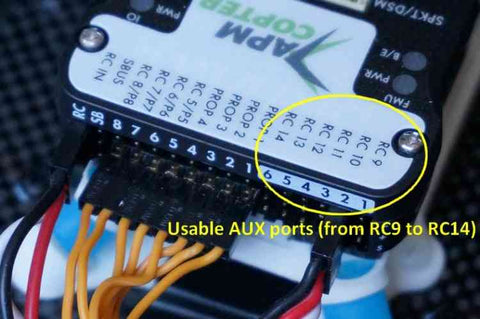
第 1 步:將來(lái)自 HDMI 觸發(fā)電纜的伺服插頭插入您選擇的 Pixhawk AUX PWM 端口(通常是第二個(gè)插槽,RC10 端口)。確保白色電纜位于底部 PWM 信號(hào)排引腳中,如下圖所示:
第 3 步:使用 USB 數(shù)據(jù)線將 Pixhawk 連接到您的計(jì)算機(jī)。打開(kāi)Mission Planner并單擊右上角的連接按鈕。
第 4 步:?jiǎn)螕羝聊豁敳康摹芭渲?調(diào)整”按鈕。單擊左側(cè)的“完整參數(shù)列表”。在右側(cè)的搜索框中鍵入“rc7_function”。確認(rèn)值為 0。
步驟 5:在頂部點(diǎn)擊“初始設(shè)置”按鈕,點(diǎn)擊左側(cè)的“可選硬件”,然后點(diǎn)擊“相機(jī)云臺(tái)”。根據(jù)以下值更改快門(mén)部分的值,然后按鍵盤(pán)上的 ENTER:
RC10
伺服限制:
最低 1000
最大 2000
快門(mén):
推動(dòng):2000
未推送:1000
持續(xù)時(shí)間:1
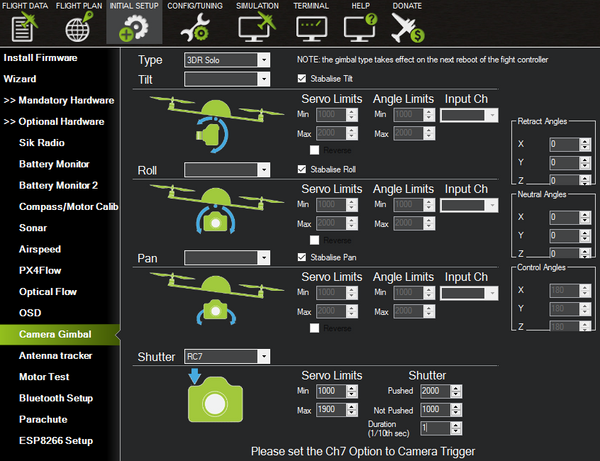
導(dǎo)航到“飛行數(shù)據(jù)”,然后返回“初始設(shè)置”>“可選硬件”>“相機(jī)云臺(tái)”,并驗(yàn)證所有設(shè)置與上圖完全相同。
第 6 步:打開(kāi) Survey3 攝像頭。選擇后 LCD 屏幕右下角的照片設(shè)置圖標(biāo)。拖動(dòng)直到您看到間隔選項(xiàng)并更改為關(guān)閉。對(duì)要通過(guò) PWM 觸發(fā)的所有攝像機(jī)執(zhí)行此操作。
第 7 步:將連接到 Pixhawk 的 HDMI 觸發(fā)電纜插入 Survey3 攝像機(jī)。
第 8 步:回到 Mission Planner 進(jìn)入“Flight Data”屏幕,在地圖上的任意位置用鼠標(biāo)右鍵單擊,選擇“Trigger Camera NOW”測(cè)試相機(jī)觸發(fā)器。如果相機(jī)沒(méi)有觸發(fā),那么您可能需要在 Pixhawk 上進(jìn)行出廠重置并在 Mission Planner 中重做上述步驟。

第 9 步:任務(wù)完成……安全飛行!:)
上一條:
Survey3 如何連接GPS模塊
下一條:
如何選擇相機(jī)濾光片
馬普科技(福州)有限公司
微信二維碼
 添加微信
添加微信
 聯(lián)系我們
聯(lián)系我們
 電話咨詢
電話咨詢